 |
| Left to right: Mech 23, 26, 27 and 34 |
 |
| Left to right: Mech 20, 25, KB1 and KB 2 |
 |
| Left to right: Mech KB2, KB 3, KB 4 and KB5 |
 |
| Left to right: Mech KB 6 and KB 7 |
I also decided to create silhouette models within 3DS MAX in order to see if their shapes worked as well as their design. To do this, I turned the shader scheme onto 'consistent colours', duplicated the finished robots and made them black. I then placed two white image planes in the scene for a clear background. From here I simply captured still images, put them into Photoshop and placed them with groups. I took both side and top views so that I would be able to analyze their shapes from more than just one angle. Note the numbers represent either their thumbnail placement or which kitbashed robot they are.




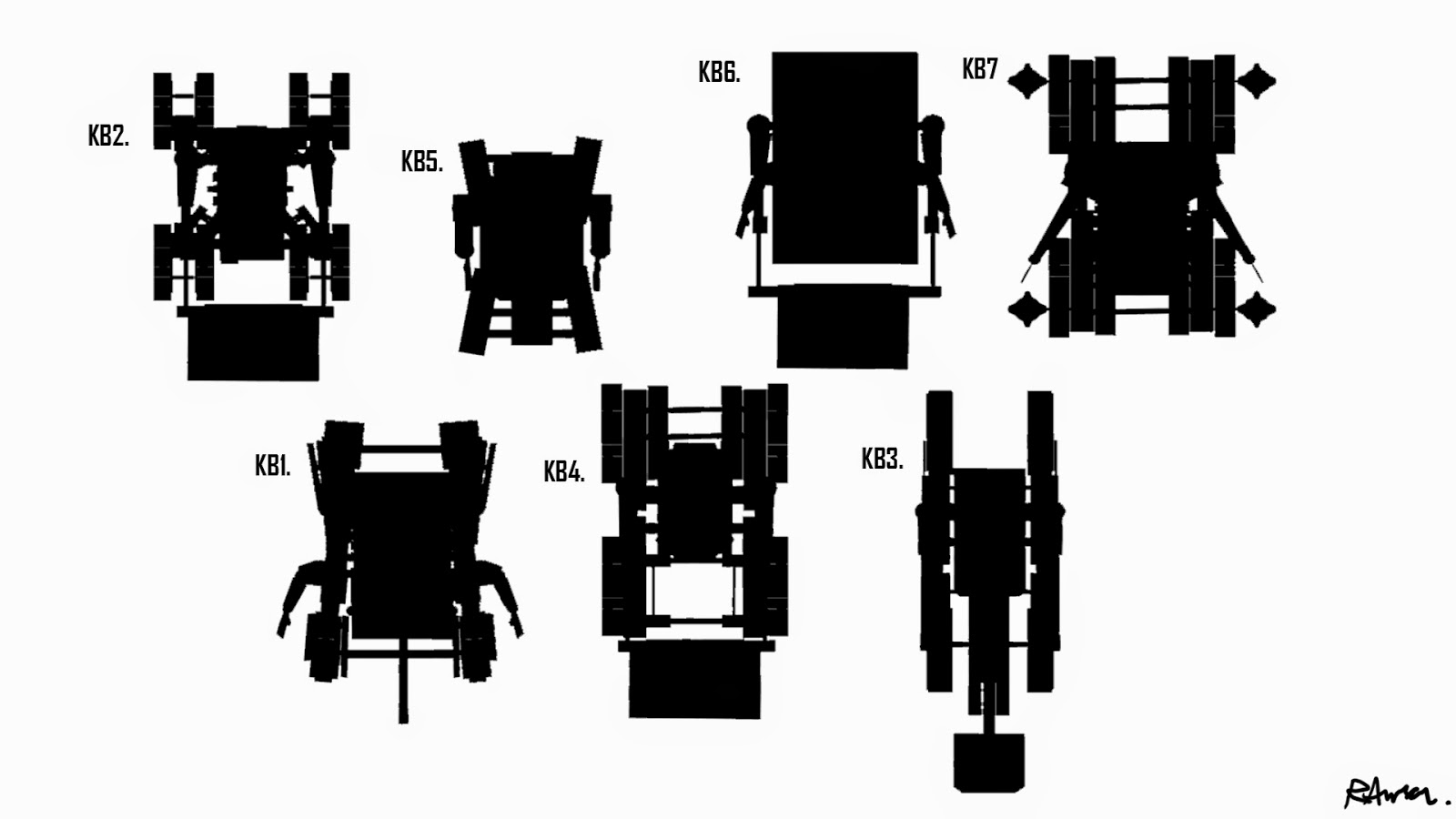
From doing this I found a lot of them had a strong side profile, however when it came to the top view models that had components such as tank bases, they looked a lot weaker, so I decided that they wouldn't be considered strongly for the final designs. Also the two legged robots from a previous post wouldn't work in a realistic sense, so I've chosen to ignore them as well.
My aim now was to minimize the number of robots that I would use to continue my development work. I found it a little difficult to choose at first, so instead decided to ask a few people round the labs which ones they would choose, and eventually got a voting system going wherein I would show them all of my designs, and they would pic their favourite four, so that whilst reducing the number of robots, still giving me a fair amount to work with. I voted as well so that I could compare my favorites to everyone else's.
This also helped as it gave me a perspective on what other people though were cool robots, as well as ones that they believed to be functional for my project idea.
The results of this and the people who took part are listed below (Note in the survey the robots are listed from 1 to 14 and not by their respected thumbnail or kitbashed numbers)
People who took Part:
Robert Anson, Caitie Graham, Will Ahmadi, Luke Dawson, Stephen Reeson, Mike Taylor, Jamie Reynolds, Joel Holgarth
Results:
.1 0 votes
.2 1 vote
.3 3 votes
.4 5 votes
.5 2 votes
.6 3 votes
.7 0 votes
.8 7 votes
.9 3 votes
.10 2 votes
.11 2 votes
.12 0 votes
.13 2 votes
.14 4 votes
So as you can see some robots were completely ignored, some were agreed on, and others were liked really well. So based of the votes cast, and my on decisions on some of the tied ones, I decided upon the final robots to use for further developmental work, as you can see below.
 |
| The final four: Top Left Mech 26. Top Right Mech 27. Bottom Left Mech KB1. And Bottom Right Mech KB 7 |
So with these basic blockouts out of the way, the next post will deal with further concept art and research done for the robot mechs.
No comments:
Post a Comment